















































T15 曲線 機器操作手册
Գլխավոր 1 Ընդհանուր տեղեկություններ
1.1 Əsկիզական ինտերֆեյս
Սիստեմայի էլեկտրական հասցեն և սկիզբը ավարտվելուց հետո, այն գալիս է գլխավոր էջ, ինչպես ցուցադրված է նկարում .

1. Աջ կողմում գտնվում է ֆունկցիոնալ բարը, ներառյալ ձախ և աջ կոճակները  իշխանության մակարդակի մուտքի կոճակը
իշխանության մակարդակի մուտքի կոճակը  , ստացումների ցուցող կոճակը
, ստացումների ցուցող կոճակը  , менյուի կոճակը
, менյուի կոճակը  և համակարգի ամսաթիվի և ժամի ցուցումը։
և համակարգի ամսաթիվի և ժամի ցուցումը։
2. Սեղմեք լավագույն ուժի մակարդակի մուտքի վրա, և մուտքագրեք ձեր օգտագործողի անունը և գաղտնաբառը՝ առաջին պատճառով՝ մուտք գործելու համար լավագույն ուժի մակարդակում, որպեսզի տեսնեք էջի ավելի շատ։
3. Մենյուի աստիճան՝ Այս համակարգը բաժանված է 6 մենյուների՝ հիմնական ֆունկցիաների համաձայն՝ որոնցից՝

Արտադրանքների գրադարան՝ արտադրանքների ստեղծում, պահպանում, կարդացում և ջնջում։
Արտադրանքների գրանցում՝ արտադրանքների թիվի սահմանում և արտադրանքների գրանցում։
Գործի սահմանում՝ գործի սահմանումից հետո փոխարինելով մոդելը՝ մաքսիմալ բացման կարգավորում։
Դուրս գրանցում՝ Այս էկրանում դուք կարող եք կատարել մանուալ գործողություններ անդամների վրա։
Համակարգի պարամետրեր՝ մեքենայի կարգավորում, մեքենայի ստացումների և սահմանափակումների պարամետրեր։
Սիստեմային կարգավորումներ՝ սիստեմայի ժամ, տվյալների պահպանում և վերականգում, խոսքերի գրանցումներ, էներգիայի մակարդակի կարգավորումներ և այլն.
Երկրորդ գլուխ՝ արտադրյալների գրադարան
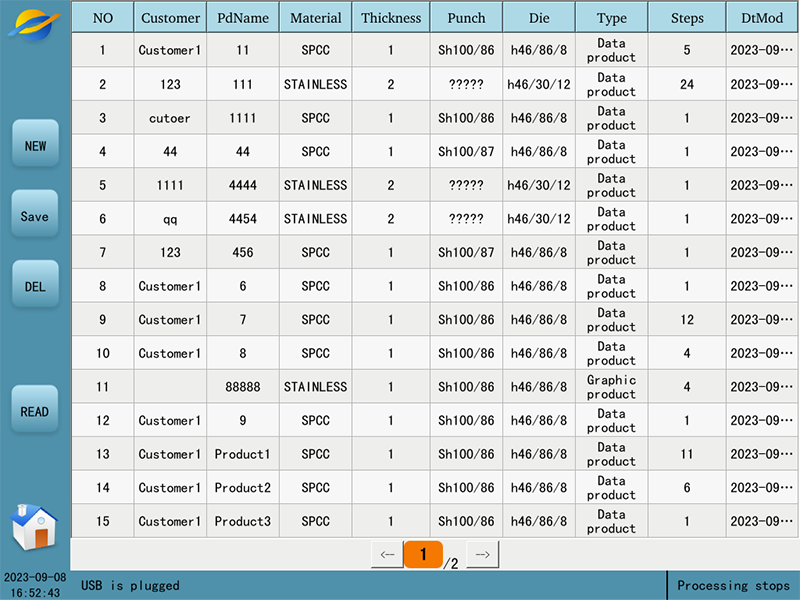
1. Սեղմեք «Նոր» կոճակը՝ ավտոմատացիայով փոխանցվելու համար «Կառուցում» էկրանին, որտեղ կարող եք խմբավորել դատարկ արտադրյալի քայլերը:
2. Սեղմեք «Պահպանել» կոճակը՝ մուտքագրեք գործնականի անունը և արտադրյալի անունը դրանացնող պատուհանում, և «Կառուցում» էկրանում գտնվող արտադրյալի տեղեկատվությունը պահպանվելու է արտադրյալների գրադարանում:
3. Ընտրեք արտադրյալ և սեղմեք «Ջնջել» կոճակը՝ արտադրյալը կջնջվի արտադրյալների գրադարանից:
4. Ընտրեք արտադրյալ, սեղմեք «Կարդալ» կոճակը՝ արտադրյալը կկարդալի «Կառուցում» էկրանին:
Երրորդ գլուխ՝ ազատ ծագումի աշխատանքի քայլերի խմբավորիչ


Դեղադադար՝ Սեղմեք Դեղադադարի անունը՝ մուտքագրելու համար Դեղադադարի գրադարանը և ընտրելու համար ձուգ: Օգտագործողները կարող են ստեղծել, խմբավորել, ջնջել և կարդալ ձուգեր Դեղադադարի գրադարանում, մանրամասների համար տեսեք «Չորրորդ գլուխ՝ Ձուգերի գրադարան»-ում:
Դեղատարան՝ նույնն է, ինչ «Դեղադադար»-ը: Այստեղ կարգավորված ձուգի պարամետրերը ենթադրում են սիստեմային նախնական ձուգ:
Մատերիալը. Սեղմեք մատերիալի անունը՝ ընտրելու համար պրոցեսավորված մատերիալը մատերիալների գրադարանից:
Պլատի հաստությունը. Խմբագրեք մատերիալի հաստությունը:
Անկյունային ծռում. սեղմեք  կարող է ընտրել «անկյունային ծռում», «դիրքային ծռում», «հարթ ծռում», «ենկույզի ծռում» ձև։ Հետո ընդամենը ծռումի տարբեր ձևերին համաձայն մուտքագրեք համապատասխան անկյունը կամ դիրքը:
կարող է ընտրել «անկյունային ծռում», «դիրքային ծռում», «հարթ ծռում», «ենկույզի ծռում» ձև։ Հետո ընդամենը ծռումի տարբեր ձևերին համաձայն մուտքագրեք համապատասխան անկյունը կամ դիրքը: 
Բարական: Սեղմեք՝ ընտրելու համար բարական կամ պալետացում:
Արտաքին չափեր. Սեղմեք  ընտրելու համար «Արտաքին չափեր», «/Internal Dimension», «x- axis position»:
ընտրելու համար «Արտաքին չափեր», «/Internal Dimension», «x- axis position»:
R-առանցք. Մուտքագրեք R-առանցքի դիրքը:
Դիրքային շեղում. Մուտքագրեք դիրքային շեղման դիրքը:
Z-առանցք. մուտքագրեք Z-առանցքի կենտրոնական կետի դիրքը, քանի որ Z1, Z2 դիրքերի հաշվումն է; X-առանցք. Դիրքը, որտեղ հետագծի հորիզոնական շարժումն է ուղղագիծ մոդելի ուղղությամբ:
Սեղմումը աշխատանքի քայլերի թվի վրա բերում է չորս կոճակների՝ աշխատանքի քայլերի համաձայնության համար, դրանք են՝

Ჩაփակել. ჩափակեք դատարկ գործողության քայլը տարբերական աշխատանքի քայլից վերևում:
Ջնջել. ջնջեք տարբերական աշխատանքի քայլը, հետո աշխատանքի քայլերը ավտոմատապես տեղափոխվում են մեկ գործից վերևում:
Վերից տեղափոխել. փոխել տարբերական աշխատանքի քայլի դիրքը նախորդ աշխատանքի քայլի հետ:
Ստորից տեղափոխել. փոխել տարբերական աշխատանքի քայլի դիրքը հաջորդ աշխատանքի քայլի հետ:
3.1 Ամանորոշ հղում
Դեպի ամանորոշ պարամետրերի աջ կողմի մշակումը, նույնպես կա մոդի ընտրության գլխավոր դեպքում ձախ կողմից:
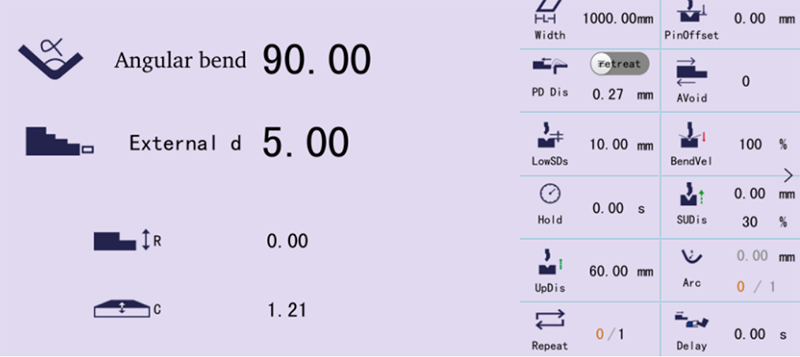
Կորումի մեթոդի ընտրություն.
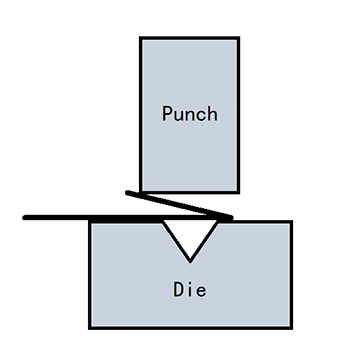
Ազատ կորում. Արձանը կորում է նշված անկյունը Պունչի ներդրումից անց ցանկացած խորությամբ, ինչպես ցույց է տրված նկարում։ Համակարգը հաշվում է Y-առանցքի պահանջվող դիրքը՝ ստանալու համար նշված անկյունը։ Ազատ կորումը պահանջում է Պունչի անկյունը լինի փոքր կամ հավասար Դիանի անկյանը, իսկ նպատակային անկյունը՝ մեծ լինի ամբողջությամբ և Դիայի անկյուններից:
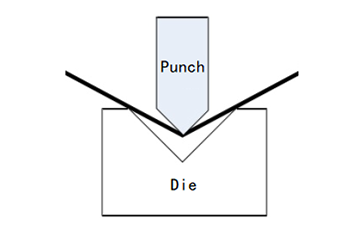
Նկար 3-4 Ազատ կորում
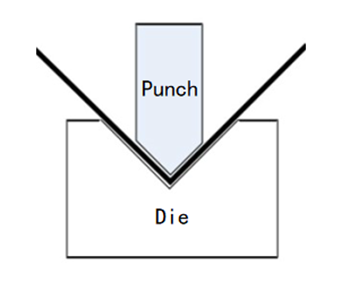
Սեղմում ստորից՝ Պանչը կփոխվի ստորից Դիե-ին, որպեսզի ստանալ պահանջվող ծռուցման անկյունը, ինչպես ցույց է տրված նկարում: Y-աxis դիրքը Դիե-ի ստորից դիրքն է հանված սալի հաստությունը, որը կարող է حيحումբերով ուղղվել:
Ապացուցում ծռուցում՝ սալը սեղմում է ստիպված անկյուն նախորդ ծռուցման հետո, օգտագործելով ապացուցման Պանչը, սալի ստիպված անկյունը ապացուցվում է և սալը կփոխվի, ինչպես ցույց է տրված նկարում 3-6 Y-աxis դիրքը ստացվում է սեղմող սալի կետի դիրքից հանված սալի հաստությունը, որը կարող է ճշգրիտ արժեքով ուղղվել:
Ստորից սեղմում ապացուցում՝ նման է սեղմում ապացուցում ծռուցմանը, Y-աxis դիրքը ստացվում է սեղմող սալի կետի դիրքից, որը կարող է ճշգրիտ արժեքով ուղղվել:
Երկարություններ՝ ներքին երկարություններ, դիրքային երկարություններ: Ինչպես ցույց է տրված նկարում:
Ստորակետից մետաղաշենքի ներքին մասից հեռավորությունը ծռուցման ժամանակ, այն կոչվում է ներքին չափ:
Կանգնածի ծայրից տեսակավոր մետաղի դրական կողմից հեռավորությունը ծայրական կետում, որը կոչվում է դրական չափը:
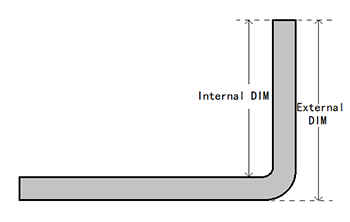
X-աxis թարգման դրական դիրքը հաշվվում է տարբերաբար ներքին և դրական չափերի համար, քանի որ ներքին կողմը սեղմում է, իսկ դրական կողմը ձեւափոխվում է, երբ տեսակավոր մետաղը ծայրական կետում է: X-աxis թարգման դրական դիրքը մեծ է ներքին չափից և փոքր է դրական չափից:
Հետուալ արգելափակիչի նյութը՝ արգելափակիչ և պահում է նյութը: Երբ X-աxis հեռավորությունը կարճ է, ընտրեք արգելափակիչի โրդը: Երբ X-աxis-ը երկար է, նյութի կշիռի պատճառով դեպի ներքև կարող է սեղմվել, կարող եք ընտրել palletizing โրդը, որտեղ նյութը կտեղադրվի
արգելափակիչի մատուցիկների առջև պահելու համար: Երբ օգտագործում եք pallet mode-ը, համակարգը ավտոմատ հաշվում է X-աxis և R-աxis թարգման դիրքերը pallet mode-ում:
Վերադարձի հեռավորությունը՝ X-աxis-ին պահանջվող հեռավորությունը, որը պետք է հեռացնել, երբ սլայդը ներս ներս անցնում է սեղմող կետում:
Կենցրումը: Այն դիրքը, որտեղ սլայդը պակաս է սեղվում սահմանափակի դիրքում:
Պլատաformaի լայնությունը: Պլատաformaի լայնությունը մոլդի երկարության դիրքում:
Կրկնել: Տրամադրված գործողությունների քանակը, որոնք պետք է կրկնել:
Գործողությունների փոխանցման 型号: Երբ սեղմում եք՝ փոխվում է «օգտագործել» ռեժիմին, Y-առանցքի վերադարձից հետո՝ պետք է մեկ անգամ սեղմել ներքև անցնելու պեդալը՝ այն դեպքում, երբ սկսում է շարժվել հաջորդ քայլի համար նշված դիրքին:
Գործողությունների փոխանցման դելայի ժամանակը: Դելայի ժամանակը նախորդ գործողության փոխանցման դեպքում:
Մեկնաբանությունների հեռավորությունը: Հարաբերակցման կետից սկսած արագության փոխանցման կետի միջև հեռավորությունը։ Եթե ներկայացող գործողության մեկնաբանության հեռավորությունը 0 է, օգտագործվում է «նախնական մեկնաբանության ժամանակը»։ Եթե նախնական մեկնաբանության արագությունը նույնպես 0 է, օգտագործվում է սիստեմային նախնական մեկնաբանության արագությունը:
Պահելու ժամանակը: Հանգույցից հետո պահելու ժամանակը։ Եթե ներկայացող գործողության պահելու ժամանակը 0 է, օգտագործվում է «նախնական պահելու ժամանակը»:
Բաժին 4Մոլդի գրադարան
4.1Դեպի գրադարան
«Մաշինակարգում» էկրանում սեղմեք Punch-ի անունը՝ ուղարկելու համար Punch գրադարանի էկրան, ինչպես ցույց է տրված նկարում:
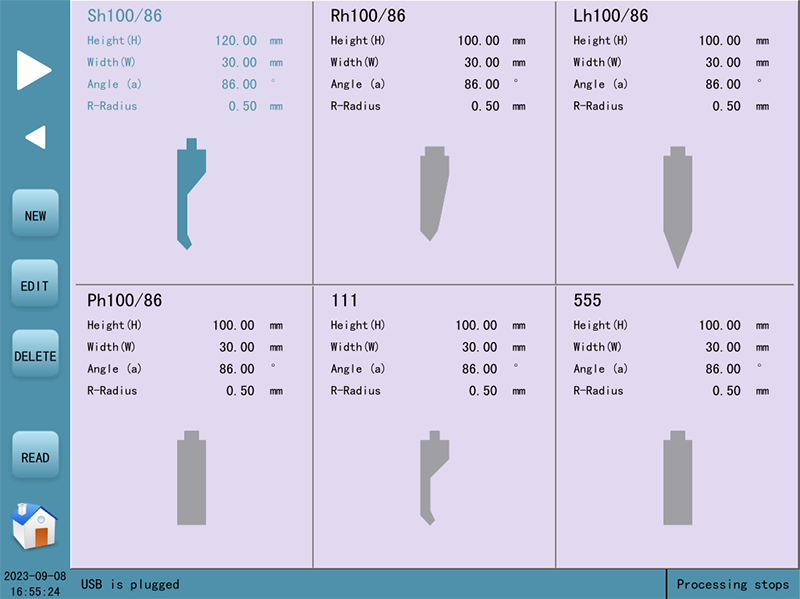
Վերևի մոդելի գրադարանը ցույց է տալիս համակարգում պահպանված վերևի մոդելների ցուցակը, որը կարող է պտտվել ձախ սլաքով:
Սեղմեք մե뉴ի բարի դրական կոճակը:
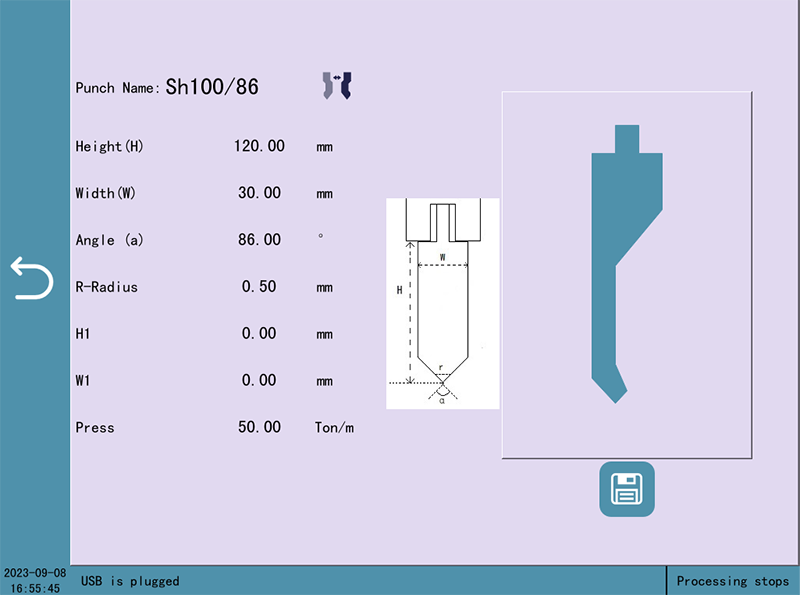
Նոր: Սեղմեք «Նոր»՝ նոր տիպերի Punch-եր բերելու համար՝ մուտքագրման ինտերֆեյսում, ինչպես ցույց է տրված նկարում:
Խմբագրել: Սեղմեք «Խմբագրել», թերություն փոխելու համար ներկայիս`t Punch-ի պարամետր:
Ջնջել: Ընտրեք Punch և սեղմեք «Ջնջել», ուղարկելու համար նշված Punch-ը ջնջելու համար:
Կարդալ: Ընտրեք Punch և սեղմեք «Կարդալ», ուղարկելու համար ընտրված Punch-ը կարդալու համար ներկայիս`t կիրառության մեջ:
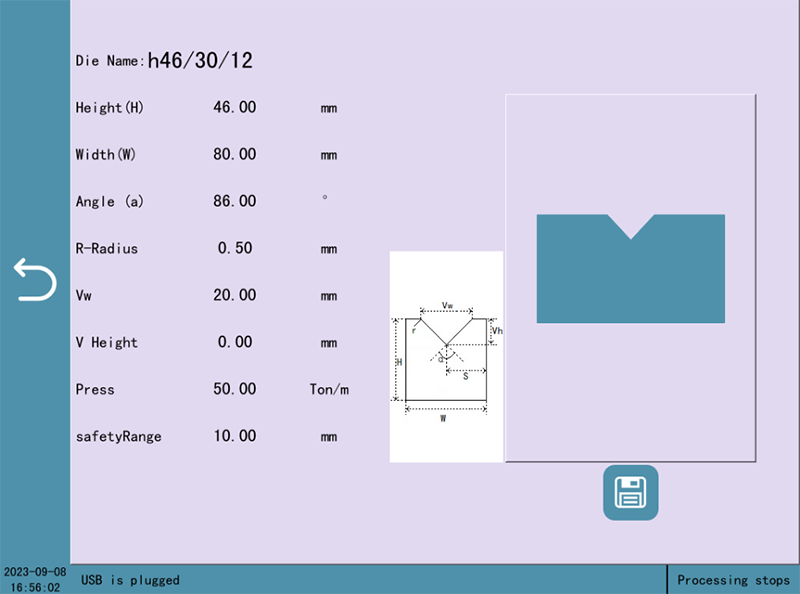
4.2 Դիե գրադարան
Բաժն 5Համակարգ
5.1 Ալարմի խնդիրների լուծում
| Համար | Նախագումարկի նկարագրություն | Ստուգում նախագումարկի |
| Err1 | Մոտորը չի աշխատում | Սեղմեք START կամ մոտորի կոճակը՝ մոտորը իջեցնելու համար |
| Err2 | Giới hạnի սահմանների հասցե | Գրանցվեք միայն քայլի էկրանում, շարժվեք դիմաց հակառակ ուղղությամբ և թողնեք սահմանափակիչը |
| Err3 | Երկու ծայրերն էլ սահմանափակում են | Проверьте, поврежден ли ограничитель или есть разрыв цепи в линии |
| միաժամանակ | ||
| Err4 | Неверная целевая позиция оси | Проверьте, установлена ли целевая позиция для проверки верхнего и нижнего предельного диапазона |
| установка позиции | ||
| Err5 | Не найдено действительной линии | В текущем рабочем шаге есть ошибка в параметре ввода |
| Err7 | Перед действием, | Մուտք ստացեք ստացույցի էկրան, սեղմեք որոնման կոճակը և սպասեք, մինչև որոնումը ավարտվի: |
| խնդրում ենք որոնել | ||
| վՐԱՏԵԿՈՒԹՅՈՒՆ | ||
| Err14 | Y-առանց թերթելու | Մուտք ստացեք միահատոր էկրանը, գլուխին միահատոր կամ ձեռքով պտտեք՝ սեղմիս սլայդը: |
| Err16 | Ծանր կանգնում | Ազատեցրեք ծանր կանգնման կոճակը |
| կոճակը սեղմված է | ||
| Err17 | Ծաղկացնել տարածությունը | Արձագանք տարածության աճման կոճակից |
| կոճակը սեղմված է | ||
| Err21 | Սխալ կարգավորում | Հաrozավորության ռիսկ հետևանքային նյութի հետ, ստուգեք կարգավորման պարամետրերը |
| հետևանքային դիրք | ||
| Err30 | IO քարտ | Կրկին միացրեք համարժեքական կաբելը PLC-ի և IO միջև |
| համարժեքական կապը օֆլայն է | ||
| Err34 | Երեսը հասնում է | Մուտք միացայցական էkrani, դառնալիս հակառակ ուղղությամբ շարժման |
| սահման | ||
| Err38 | Բավարանքային ուղերձ | Ստուգեք դրավի զարդարանային հայցեր |

